
Rotation d’axe, détermination par le calcul des axes principaux (html).
Résumé de section
Avertissement
La détermination complète par le calcul des axes principaux nécessite des connaissances qui dépassent sans doute le cadre du programme. Cependant l’utilisation du logiciel Excel joint à ce cours rend cette détermination très aisée .L’essentiel étant de connaître l’existence de ces axes et le moyen de les déterminer facilement
L’auteur : PB 01/03/2013
Exemple de détermination des axes principaux et moments principaux d’un profilé en Z
1-Compétences nécessaires pour la compréhension du document :
Connaitre les définitions :
-du moment quadratique (ou moment d’inertie) d’une section par rapport à un axe.
-du produit d’inertie d’une section par rapport à deux axes.
-du théorème de Huyghens relatif aux moments d’inertie
2-Objectifs du document :
-Apprendre à calculer : un moment quadratique ou moment d’inertie (grandeur toujours positive) et un produit d’inertie (grandeur algébrique).
-Utiliser le théorème de Huyghens.
-Utiliser la construction graphique du cercle de Mohr pour déterminer les axes principaux d’inertie d’une section.
Cette partie doit être considérée comme un approfondissement utile pour la compréhension du cours mais sa connaissance n’est pas exigible.
L’animation Excel proposée permet de tracer automatiquement le cercle et détermine la position qp des axes principaux OX et OY. Elle effectue les calculs des moments quadratiques principaux Ix et IY. L’apprenant pourra se contenter de connaître la définition des axes et moments principaux et d’apprendre à utiliser le logiciel.
-Comprendre l’utilité des axes principaux d’une section dans le but d’utiliser les profilés dans les meilleures conditions de stabilité pour les constructions.
3-Problème posé et intérêt de la recherche des axes principaux :
Le problème de la détermination des axes principaux se pose uniquement si la section étudiée n’est pas symétrique par rapport aux axes du repère de référence choisi (cas d’un profil en cornière L simple ou en Z par exemple).
La non symétrie entraine une valeur non nulle du produit d’inertie de la section par rapport aux axes.
Dans ce cas, il faut rechercher un repère dit « principal » OXY orienté d’un angle qP par rapport à ce repère initial et par rapport auquel le produit d’inertie IXY est nul.
On montre que les moments d’inertie IX et IY par rapport aux axes principaux (appelés « moments principaux ») ont alors des valeurs extrêmes (l’un est maximal et l’autre minimal). D’où l’intérêt de les calculer pour une section du commerce ou reconstituée non symétrique car ils ne sont généralement pas donnés dans les tableaux de profilés. Leur détermination est nécessaire pour étudier le comportement en flexion ou en compression d’une poutre ayant cette section.
Signalons enfin que dans le cas des profilés symétriques du commerce en I ou en H, les axes principaux sont les axes de symétrie Ox et Oy de la section. Et donc, les moments principaux Ix et Iy correspondants sont ceux donnés dans les catalogues.
4-Méthode de détermination du repère principal par rapport aux axes Ox et Oy du repère de référence :
4-1-Evaluer les moments d’inertie Ix1 Iy1 et produit d’inertie Ixy1 de la section S relativement au repère de référence Oxy
(l’indice 1 désigne ici Oxy comme le 1er repère de référence caractérisé par un angle de rotation q=0)
Cette partie nécessite une décomposition de la section en éléments simples (rectangles en général).
L’application du théorème de Huyghens à chaque élément permet d’obtenir assez facilement le résultat si les calculs sont menés méthodiquement (voir exemple traité ci-dessous).
4-2-Tracé du cercle de Mohr (sur une feuille de papier ou à défaut dans le logiciel d’animation Excel)
Ce tracé permet une détermination graphique simple des axes principaux et des moments principaux
Ce tracé est effectué dans un repère (dit de Mohr) constitué de 2 axes perpendiculaires :
- Un axe horizontal gradué en unité de moment d’inertie (cm4)
- Un axe vertical gradué en unité de produit d’inertie(cm4)
Il faudra choisir une échelle sur ces deux axes : par exemple une graduation de 1cm de longueur correspondra à 1cm4. Cette échelle dépendra des valeurs numériques de Ix, Iy et Ixy obtenues par calculs. (le logiciel détermine quant à lui automatiquement l’échelle !)
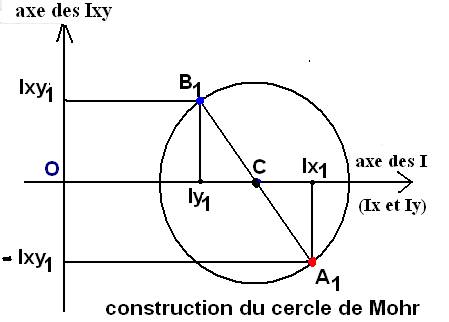
A ces 3 grandeurs d’inertie calculées auparavant correspondent deux points A1 et B1 du repère de Mohr de coordonnées A1(Ix1,Ix1y1) et B1 (Iy1, -Ix1Iy1).
Joindre ces deux points. A l’intersection du segment A1B1 avec l’axe des abscisses horizontal se trouve le centre C du cercle.
Il suffit de tracer le cercle de centre C et de rayon CA1 avec un compas sur une feuille de papier de format A4 par exemple
(Sur l’animation Excel, le tracé du cercle et du couple de points A1 et B1 sur le cercle s’effectue automatiquement après avoir entré les valeurs de Ix,Iy et Ixy !)
4-3-Détermination des moments d’inertie et produits d’inertie par rapport à un autre repère de référence incliné de q par rapport à Oxy :
Cette rubrique est intéressante si l’on veut changer de repère de référence.
A cette valeur de q correspond deux nouveaux points représentatifs diamétralement opposés sur le cercle de Mohr soient : A2(Ix2,Ix2y2) et B2 (Iy2,-Ix2Iy2) . Le segment A2B2 étant incliné d’un angle double 2q par rapport à A1B1 sur le cercle.
Retenons qu’à chaque rotation de q du repère de référence correspond une rotation de 2q du couple de points diamétralement opposés sur le cercle.
4-4-Détermination des moments principaux IX et IY et des axes principaux de la section S:
Ces moments principaux sont relatifs à un repère dit principal : OXY.
A ce repère principal correspond le couple de points A et B
Ces deux points se situent à l’intersection du cercle et de l’axe des moments d’inertie (axe des abscisses horizontal du repère O, Ix et Iy, Ixy).
Leurs coordonnées sont respectivement A(IX,0) et B(IY,0).
La détermination de l’angle de rotation qP du repère OXY par rapport au repère de référence Oxy sera déterminée à partir de l’angle double 2qP dans le plan de Mohr entre A1B1 et AB.
(sur l’animation Excel, il suffit de modifier l’angle q en partant de zéro pour arriver à q=qp lorsque les 2 points A (rouge) et B (bleu)se trouvent sur l’axe horizontal passant par le centre C du cercle).Aucun calcul n’est à faire !
Nous donnons ci-dessous, à titre indicatif, les coordonnées du centre C, l’expression du rayon du cercle et l’angle entre A1B1 et AB (relations à ne pas mémoriser !)
Centre du cercle C :
![]()
Rayon du cercle :
Le théorème de Pythagore dans le triangle hachuré permet de retrouver son expression :
Angle 2qp, il est tel que :
![]()
Ces formules ne sont pas à mémoriser, la compréhension du principe de la construction du cercle est suffisante.
Nous allons appliquer toutes ces notions sur un exemple :
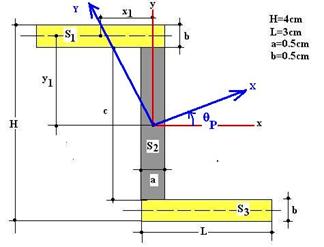
5- Exemple : recherche des axes principaux d’un profilé en Z
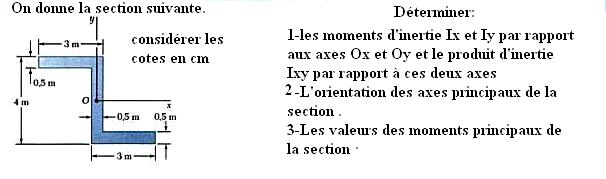
Décomposons la section en 3 parties :
On négligera la présence des congés de raccordement éventuels entre les 3 parties.
1- Calculs des moments et produits d’inertie :
Le moment d’inertie de S par rapport à l’axe x est la somme des moments d’inertie par rapport à x de chaque section :
Ix= Ix(S1)+ Ix(S3)+ Ix(S2)
Appliquons le théorème de Huyghens pour calculer Ix(S1)
Le moment d’inertie de S1 par rapport à l’axe x est égal au moment d’inertie de S1 par rapport à l’axe x1 parallèle à x et passant par le CDG de S1 (appelé souvent « moment d’inertie propre ») ajouté du moment d’inertie de la section S1 (considérée concentrée au centre de gravité de S1) multipliée par la distance au carré du CDG de S1 à l’axe x.
Ix(S1) = Ix1 +S1.y12 = (L.b3)/12 + b.L.Y12 = 3.(0,5)3/12+0,5.3.(1,75)2= 4,625cm4.
De même:
Ix(S3)=4,625cm4 (la section S3 étant le symétrique de S1)
Ix(S2)=(a.c3)/12=(0,5.32)/12=1,125cm4. (c’est le moment d’inertie par rapport à l’axe passant par le CDG de S2)
Au total : Ix=4,625cm+4,625cm4+1,125cm4.=10,375cm4.
Moment d’inertie de S par rapport à y :
Iy=Iy(S1)+Iy(S2)+Iy(S3)
Iy(S1)=Iy1+S1.X12=(b.L3)/12+L.b.X12.=(0,5.33)/12+3.0,5.(1,25)2=3,47cm4.
Iy(S2)=(c.a3)/12=(3.0,53)/12=0,03125cm4.
Iy=3,47.2+0.03125=6,97cm4.
Produit d’inertie de S par rapport à x et y:
Le théorème de Huyghens s’applique aux produits d’inertie par rapport aux 2 axes. Attention : les distances à considérer sont algébriques car non élevées au carré. Tenir compte du sens des axes Gx et Gy pour déterminer leur signe.
Le produit d’inertie d’une section par rapport aux axes de symétrie passant par le centre de gravité sont nuls. Ces axes sont dits « principaux » pour la section.
![]()
Ix1y1=0 car x1 et y1 sont des axes de symétrie de la section S1.
![]()
Ix’1y’1=0 car x’1 et y’1 sont des axes de symétrie de la section S3.
Ixy(S2)=0 car x et y sont axes de symétrie pour cette section.
Ixy(total)=-3,28-3,28=-6,56cm4.
2-Orientation des axes principaux
(méthode par le calcul):
Aux grandeurs Ix, Iy, Ixy calculés dans le repère initial Oxy nous associons les deux points représentatifs A1(Ix,Ixy) et B1(Iy,-Ixy) que nous représentons dans le repère de Mohr (abscisses = moments d’inertie ; ordonnées : produits d’inertie).
Soit A1(10,37 ;-6,56) et B1(6,97 ;+6,56).Voir figure ci-dessous à gauche.
Remarque : dans le repère de Mohr toutes les cotes indiquées ont la dimension d’un moment d’inertie (unité=cm4)
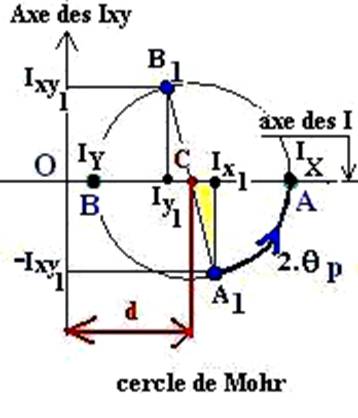
Les deux points A1 et B1 diamétralement opposés sur le cercle permettent de tracer le point C d’abscisse : (d=10,37+6,97)/2=8,67 et d’ordonnée 0.
Nous en déduisons le rayon du cercle en appliquant le théorème de Pythagore dans le triangle rectangle hachuré dont les cotés de l’angle droit ont pour valeur : (Ix-d)=10,37-8,67=1,7 et Ixy=6,56, soit :
![]()
Calculons l’angle 2q p d’inclinaison du diamètre AB :
![]()
Dans le repère de Mohr (figure ci-dessous à droite):
Pour que Ix et Iy deviennent IX et IY (moments principaux), le diamètre A1B1 doit tourner de 2qP dans le sens trigonométrique sur le cercle et se confondre avec AB sur l’axe des abscisses.
Dans le repère de la section S
Le repère Oxy doit tourner de qP =38° dans la sens trigonométrique. Soit OXY la position des axes après rotation.. OXY est le repère principal de la section
3-Moments principaux :
IX=d+R=8,67+6,78=15,4cm4.
IY=d-R=8.67-6.78=1,89cm4.
IY est minimal et IX est maximal
IXY est nul
Lien vers l’animation Excel pour tracer le cercle de Mohr et déterminer très rapidement les axes principaux et moments principaux .
animation :détermination des axes et moments principaux
4-Précautions à prendre avec des profilés non symétriques :
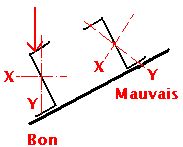
La difficulté pour un profilé non symétrique utilisé en flexion est de veiller à le positionner dans le sens le plus favorable par rapport aux charges afin d’éviter une flèche trop importante.
Un profil en Z ou en L servant de panne de couverture devra être positionné sur le versant de toiture afin que l’axe principal de la section par rapport auquel le moment d’inertie est maximal (c'est-à-dire X) soit perpendiculaire à la charge verticale de couverture (voir le schéma ci-dessous).
En compression, c’est dans le plan d’inertie minimale que le flambage est à craindre si le profilé n’est pas maintenu latéralement. On préfère souvent utiliser des profilés constitués de cornières doubles placées dos à dos plutôt que les cornières simples. Le profil est alors symétrique.
Pour un profil en I , H ou rectangulaire, les axes du repère de référence sont des axes de symétrie de la section. Le produit d’inertie de S par rapport à ces axes est alors nul. Les axes de symétrie x et y sont donc des axes principaux d’inertie de la section. Les moments d’inertie Ix et Iy par rapport à ces axes ont des valeurs extrêmes :l’un Iy est minimal et l’autre Ix est maximal. Leurs valeurs sont donnés dans les tableaux des caractéristiques des profilés.